
Interfaz neuronal predictiva para la corrección de errores en robótica industrial
El control teleoperado de maquinaria en entornos críticos presenta una vulnerabilidad estructural casi insalvable. El tiempo de reacción biológico entre la percepción visual de un error inminente y la ejecución motora de una maniobra correctiva suele ser demasiado amplio para evitar daños materiales o humanos. Investigadores del iHuman Lab en la Universidad Estatal de Oklahoma han desarrollado un marco operativo que invierte esta dinámica. En lugar de depender de la corrección manual reactiva, el sistema intercepta la señal neurológica de reconocimiento de error milisegundos antes de que el operador humano pueda mover un músculo, deteniendo a la máquina antes de que se produzca el fallo.
La decodificación de los potenciales relacionados con el error
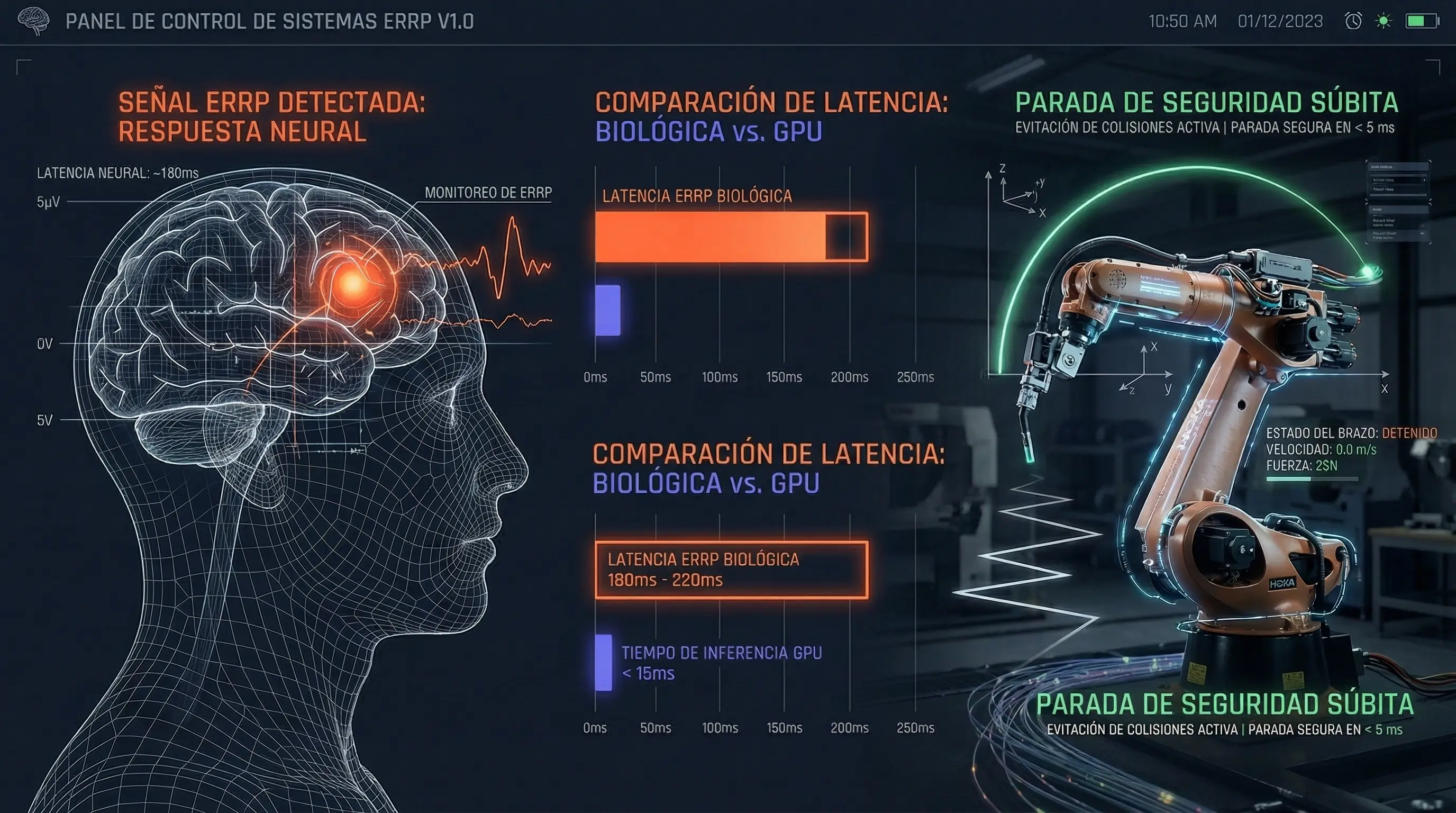
El cerebro humano opera con una latencia de procesamiento interno que este sistema aprovecha como ventaja táctica. Cuando un individuo percibe una discrepancia aguda entre el resultado esperado y el evento que se está desarrollando, la corteza cingulada anterior emite un patrón eléctrico transitorio conocido como Potencial Relacionado con el Error. Esta señal de alarma viaja a través de la red neuronal biológica mucho más rápido de lo que tarda el impulso motor en recorrer la médula espinal hasta llegar a las manos del operador.
El equipo de Manjunatha captura estas anomalías eléctricas mediante una matriz de electroencefalografía no invasiva. Históricamente, la principal barrera técnica para este tipo de interfaces ha sido la calibración, dado que cada topología cerebral es biométricamente única. Para solventar este cuello de botella, han integrado un modelo de inteligencia artificial preentrenado con patrones neuronales generalizados. Cuando un nuevo ingeniero se coloca el equipo, el modelo ajusta sus pesos dinámicamente para adaptarse a la firma de ondas cerebrales específicas del usuario en cuestión de segundos, eliminando las tediosas horas de sincronización de los sistemas de la década pasada.
Lógica temporal de señales y computación en el borde
Detectar la señal de pánico neurológico es solo la mitad de la ecuación técnica. Frenar abruptamente un brazo robótico de alta carga en una central nuclear o en una plataforma de aguas profundas puede generar una inercia destructiva peor que el error original. Aquí es donde interviene la Lógica Temporal de Señales. Este marco de reglas matemáticas estrictas actúa como un árbitro de seguridad en tiempo real, evaluando la telemetría del robot para determinar la respuesta cinemática más segura, ya sea una desaceleración progresiva, una parada total o la transferencia fluida del control manual.
Todo este procesamiento de inferencia se ejecuta localmente utilizando las arquitecturas NVIDIA Isaac Lab e Isaac ROS. Al acelerar los cálculos en unidades gráficas de grado industrial como las RTX PRO 6000, el sistema garantiza una latencia general lo suficientemente baja como para que la máquina reaccione y estabilice la situación antes de que el humano haya podido presionar físicamente el botón de parada de emergencia.
(Nota visual para la maquetación: Aquí sugiero que generemos un esquema técnico que contraste la latencia del recorrido neuronal humano frente a la velocidad de inferencia de la GPU en la corrección de trayectorias).
Implementación básica del flujo de intercepción neuronal
Para replicar un entorno de pruebas similar al del iHuman Lab, es necesario establecer un puente de baja latencia entre el hardware de adquisición biométrica y el entorno de simulación. El primer paso consiste en la captura y filtrado del flujo electroencefalográfico. Utilizando una API en Python estándar conectada al casco, se procesa la señal en crudo mediante filtros de paso banda. El objetivo es aislar las frecuencias exactas donde habita el Potencial Relacionado con el Error, eliminando el ruido eléctrico de parpadeos o movimientos musculares faciales.
Una vez purificada la señal, el segundo paso requiere desplegar el modelo de inferencia espacial. En lugar de depender de la latencia de una CPU tradicional, este tensor se compila y carga directamente en la memoria VRAM de una GPU NVIDIA mediante TensorRT. Esto garantiza que la evaluación de la ventana de tiempo neuronal se resuelva en una fracción de milisegundo. El modelo analiza el flujo constante y, al detectar el patrón matemático exacto de la anomalía cognitiva, emite un disparador de interrupción.
El tercer y último paso es la integración cinemática. A través de la arquitectura de nodos de Isaac ROS, ese disparador booleano no corta la energía del robot de golpe. En su lugar, activa el módulo de Lógica Temporal de Señales, el cual lee el vector de inercia actual del brazo robótico y genera una trayectoria de frenado óptimo. Los comandos de desaceleración se inyectan directamente en el controlador del servomotor, mitigando la fuerza cinética antes de que la mano del operador inicie el movimiento hacia el freno manual.
Transición hacia aplicaciones clínicas y exoesqueletos
Aunque el despliegue inicial apunta a la industria pesada y la mitigación de riesgos operativos, el impacto real a largo plazo reside en la robótica biomédica. Dado que los investigadores planean liberar el código fuente y los pesos del modelo, la integración de esta tecnología en prótesis avanzadas es el siguiente paso lógico. Las prótesis biónicas actuales a menudo sufren de desalineación de intenciones, donde el hardware realiza un micromovimiento que el paciente percibe subconscientemente como erróneo o antinatural. Integrar esta capa de validación cognitiva permite que los exoesqueletos corrijan su propia cinemática en tiempo real basándose en la incomodidad neurológica del usuario, logrando que el hardware se comporte genuinamente como una extensión biológica fluida.
Riesgos operativos y el límite de la carga cognitiva
Desde una perspectiva de viabilidad práctica en este 2026, el paradigma presenta ciertas fricciones. La teleoperación inmersiva asistida por electroencefalograma exige niveles sostenidos de concentración que aceleran severamente la fatiga mental del operador. Además, los falsos positivos derivados de distracciones externas o fatiga visual podrían inducir paradas de seguridad fantasma en entornos donde la continuidad operativa es crítica. A medida que delegamos la interpretación de la voluntad humana a modelos de pesos abiertos, la delimitación de responsabilidades ante un fallo mecánico se difumina, abriendo un debate necesario sobre la certificación legal de la telemetría neuronal en entornos industriales de alto riesgo.